
 | В прошлых двух заметках были перечислены первые несколько частей занятия, посвященному изучению механики шагающих роботов. Данные части готовили учащихся к экспериментальной работе, которая является заключительной на данном занятии. Вместе с теоретической составляющей занятие рассчитано на 3-4 академических часа. |
Часть IV. Первый путь.
Объявите командам, что теперь перед ними стоит задание - собрать робота, который максимально быстро сможет пройти расстояние в 30 см. В ходе задания команды должны провести не меньше 3-х экспериментов, меняя физические характеристики педипуляторов, чтобы определить при каких соотношениях размеров частей педипуляторов, робот движется максимально быстро.
В ходе экспериментов учащиеся должны заполнить таблицу:

Где части педипулятора обозначены следующим образом.
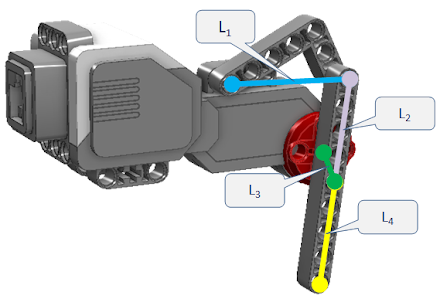
Попросите учащихся перечертить схему механической системы педипулятора еще раз и проставить обозначения ее частей, чтобы избежать путаницы при проведении экспериментов.

Также объявите командам, что они должны собрать из тех прототипов, что у них есть (в ходе работ в предыдущей части занятия в каждой команде должно получиться по две ноги, собранных каждый на своем моторе) робота и запрограммировать его. Мощность на моторах не должна изменяться в ходе экспериментов.
У команд должен получиться робот подобный этому:

В ходе экспериментов команды должны обратить внимание на то, что они делают помимо изменения размеров частей педипулятора, чтобы быть готовыми ответить на следующие вопросы. Ответы должны быть записаны в тетради после проведения всех экспериментов.
- Какое должно было быть расположение педипуляторов друг относительно друга до запуска программы, чтобы робот шагал максимально плавно?
- На каких экспериментах приходилось переделывать помимо педипулятора опорную часть робота, чтобы еще больше повысить его скорость?
- На каких экспериментах приходилось переделывать помимо педипулятора опорную часть робота, чтобы он продолжал сохранять устойчивость?
Перед началом их работы напомните командам о необходимости разбиться на роли, а также провести планирование работ.
До первого запуска робота спросите у учащихся - какое время (или показания энкодера) они выберут для указания в программе, чтобы быть уверенными, что робот пройдет расстояние не меньше 30 см. Как они выбрали это время?
Примеры того, как учащиеся могут изменять размеры частей педипулятора:
 |  |
Когда задание будет выполнено, обсудите в командах результаты экспериментов.
- Что помогало или мешало двигаться по составленному плану?
- Как бы они описали свои трудности, с которыми пришлось столкнуться при конструировании?
- К чему приводило изменение размера каждой части педипулятора?
- Что влияло на скорость перемещения робота помимо мощности и соотношения размеров частей педипулятора?
- Как бы они изменили конструкцию в следующий раз, чтобы повысить еще больше скорость робота?
Комментариев нет:
Отправить комментарий