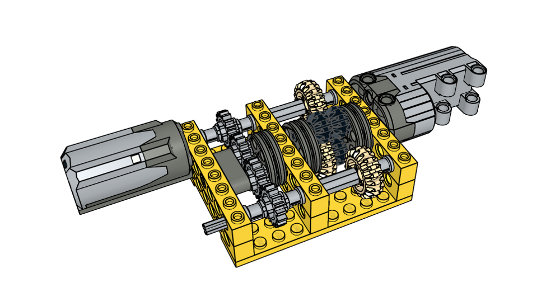
| Буквально сразу после недавней статьи про коробку передач на моторах Technic в интернете появилась другая - теперь уже, управляемая NXT блоком. Автор этого устройства в своем блоге (на английском) очень подробно рассказывает о конструктивных особенностях своего детища. |  |

вторник, 30 октября 2012 г.
Еще одна коробка передач
Алгоритмы: черно-белое движение. Часть VI
 | Продолжение. В этот раз не будет сложных формул и замудренных графиков - данная заметка посвящена именно тому для чего и предназначались роботы, а именно нудной и повторяющейся деятельности. |
Первая вычисляет коэффициент пропорциональной составляющей.



Как бы тогда хотелось, чтобы устройство функционировало?
воскресенье, 28 октября 2012 г.
Коробки передач и нешестероночные передачи
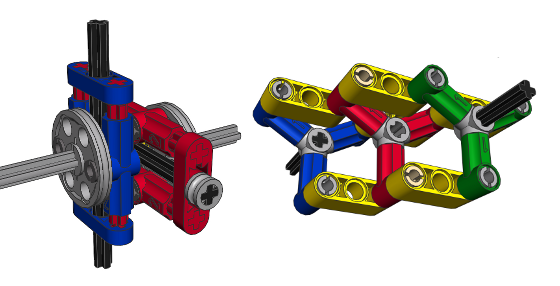
| Давно что-то не было интересных механизмов в блоге. Поэтому встречайте, два заслуживающих внимания видео-ролика от польского LEGO-гуру Sariel. |  |
суббота, 27 октября 2012 г.
Датчик магнитного поля и мультиплексор для датчиков касания от SmartBricks
| Компания SmartBricks решила весь октябрь радовать LEGO робототехников новыми датчиками. |
 |  |
четверг, 25 октября 2012 г.
Алгоритмы: черно-белое движение. Часть V
| Когда программа из прошлой заметки будет запущена на реальном роботе, то в большинстве случаев будет заметно, что тележка не ведет себя полностью так, как ожидалось. Ведь судя по диаграммам приведенным в начале прошлой заметке, в поведении моторов должен наступать такой момент, когда один из них должен целиком остановиться, в то время как другой должен ехать с максимально возможной скоростью. Этого не происходит. | |
Чтобы разобраться почему так происходит, можно составить таблицу, показывающую предполагаемую мощность на моторах в зависимости от показаний датчика освещенности.
Для составления таблицы еще раз укажем формулы зависимости мощностей от показаний датчика, а также будем считать, что датчик на самом светлом участке поля (Lmax) показывает 60%, а на темном (Lmin) - 24%, таким образом получается, что ожидаемая освещенность на границе линии (LA) - 42%.
среда, 24 октября 2012 г.
Алгоритмы: черно-белое движение. Часть IV
| В прошлой заметке алгоритм движения вдоль линии был усовершенствован таким образом, что позволял на прямых участках двигаться роботу-тележке двумя колесами одновременно - для этого в базовый алгоритм, состоящий из двух состояний - поворот влево и поворот вправо, было введено третье состояние - движение прямо. |
вторник, 23 октября 2012 г.
Кружок по робототехнике. Занятие третье
| Третье занятие кружка началось с проверки домашнего задания. Ребята продемонстрировали, как они освоили управление моторами LEGO робота: робот должен был перемещаться по восьмерке, а также по сложной трассе, придуманной ими самими. |  |
понедельник, 22 октября 2012 г.
Магнитный датчик касания SmartBricks
 | Еще один датчик SmartBricks, который попал на тестирование в руки авторов блога NiNoXT - магнитный датчик касания. Основное преимущество данного датчика перед стандартными датчиками касания - это то, что он не требует физического контакта с поверхностью, касание с которой необходимо проверить. |
- касание с легким предметом
- касание с предметом, который нельзя тревожить и/или перемещать с места даже на чуть-чуть
воскресенье, 21 октября 2012 г.
Сортировка данных на NXT

Новые элементы LEGO Mindstorms - для быстрой и удобной работы
| В интернете существует много интересных и нужных начинаний. Возьмем, к примеру, два из них: первый - MinuteBot, в рамках которого разрабатываются новые концептуальные проекты для улучшения элементной базы LEGO Mindstorms конструкторов, и второй - KickStarter - сайт, позволяющий собрать деньги на реализацию какой-нибудь уникальной идеи. |

суббота, 20 октября 2012 г.
Новый видеоблог о робототехнике и LEGO
| Mike McFarlane из Великобритании под псевдонимом MooSooBoo недавно начал вести видеоблог, в котором он делиться своими новостями в целом о робототехнике и о LEGO-роботах в частности. |  |
пятница, 19 октября 2012 г.
LEGOWORLD 2012 в Голландии
 | В Голландии в городке Zwolle с 17 по 23 октября проходит традиционная выставка LEGOWORLD. Как это происходит? Есть там, на что посмотреть? Судите сами! |
четверг, 18 октября 2012 г.

среда, 17 октября 2012 г.
Алгоритмы: черно-белое движение. Часть III
| Робот, двигающийся вдоль линии, по алгоритму, рассмотренному в прошлых заметках, не может похвастаться особой скоростью. Явно это видно на прямых участках, где тележка, вместо того, чтобы ехать вперед двумя колесам, все-равно совершает постоянный поиск границы линии двигаясь, то одним, то другим колесом. | |
Как же это сделать?
Ниже представлена диаграмма, показывающая как изменяется характер движения тележки в зависимости от того, с какой стороны границы находится датчик света. На границе линии датчик показывает 50% освещенности.
вторник, 16 октября 2012 г.
Осторожно, в квартире сторожевой робот!

Телефон также является промежуточным звеном между программой в браузере (с помощью которой Бир может контролировать робота из любой точки мира) и своим роботом.
понедельник, 15 октября 2012 г.
Кружок по робототехнике. Занятие второе.
| Занятие второе началось со знакомства с набором LEGO Mindstorms NXT. Актуально это было еще и потому, что ребята за неделю приобрели свои наборы, и им необходимо было рассказать о том, что же это такое. | |
воскресенье, 14 октября 2012 г.
MIDI синтезатор для NXT
Данная плата питается от стандартного порта для моторов A, причем мощности вполне хватает и для внешнего динамика.
Для демонстрации работы данного синтезатора был собран робот с 3 сенсорами касания и 2 моторами. 3 сенсора дают 7 возможных вариантов проигрывания нот. Вращение первого мотора позволяет изменить громкость, а второго - октаву. Судя по видео можно сказать, что синтезатор охватывает 3 октавы.
Приставка MIDI означает, что на таком устройстве можно проиграть практически любой звук - от пианино до органа. В данной программе доступно 128 инструментов.
Подробнее о устройстве можно узнать на странице проекта.
Python, NXT и компьютерное зрение
| OpenCV (Open Source Computer Vision Library) - библиотека алгоритмов компьютерного зрения, обработки изображений и численных алгоритмов общего назначения. Она обладает большим потенциалом, который позволяет применять ее в робототехнических нуждах, так что роботы могут, подобно человеку, взаимодействовать с предметами окружающего мира - выделять и распознавать их, реагировать соответствующим образом. |
Для примера, можно рассмотреть такую возможность, как слежение за цветными объектами - пусть тележка с LEGO-пассажиром будет стремиться всегда находиться в поле зрения web-камеры:
суббота, 13 октября 2012 г.
Роботы на выставке "Калейдоскоп идей"
В эти дни (12 - 14 октября) в ННГУ им. Н.И. Лобачевского проходит фестиваль "Путь в науку". Цель мероприятия - популяризировать науку и привлечь молодежь в сферу высоких технологий.
Центральным событием фестиваля стала выставка научно-технологического творчества учащихся «Калейдоскоп идей». В рамках этого мероприятия школьники и студенты представили свои разработки в области робототехники, электротехники, авиа-, судо- и автомоделизма, а также приборы для демонстрации явлений и законов астрономии, физики, биологии, химии.
Фестиваль робототехники "Робомир" в лицее №165

На церемонии открытия был поднят флаг Робототехники и показан видеоролик о том, какие роботы были представлена на IV ассамблее наук и искусств в прошлом учебном году.
Алгоритмы: черно-белое движение. Часть II
| Продолжение. Перед чтением этой заметки, рекомендуется ознакомиться с первой частью. В прошлый раз, было показано как шаг за шагом прийти к самому простому алгоритму движения вдоль линии - линейному: |


четверг, 11 октября 2012 г.
Робо-состязания: базовые навыки по программированию роботов
| Когда учащиеся проходят некоторый базовый курс обучения, то встает вопрос, что изучать дальше, какие навыки будут необходимы для участия команд в робо-состязаниях. В ходе Летнего Робототехнического лагеря - 2012, вырисовалась примерная схема, как можно шаг за шагом готовить команды, на каких задачах их можно тренировать. |  |
Датчик звука и набор для удаленного управления от SmartBricks
| На прошлой неделе российская компания SmartBricks начала продажу сразу двух новых датчиков: датчика звука и датчика сигналов пультов дистанционного управления. |

понедельник, 8 октября 2012 г.
Подключаем NXT блок по Bluetooth к BricxCC в Windows 7
| Подключение NXT блока по Bluetooth к компьютеру всегда было больным местом для LEGO-робототехников: здесь нужно было угадать с BT адаптером и правильными драйверами, а также не напутать ничего во время непосредственного подключения блока к компьютеру/ноутбуку и обнаружения его в среде программирования. |  |
воскресенье, 7 октября 2012 г.
Кружок по робототехнике. Занятие первое
| В школе, куда пошел мой сын в первый класс, договорились с директором по выходным вести занятия по робототехнике. Кружок бесплатный, но требование - каждый участник приходит со своим набором. Да, это ударяет по карману родителей, но, на мой взгляд, все же лучше, чем покупать ребенку игровые приставки и навороченные телефоны. |
суббота, 6 октября 2012 г.
Python и MotorControl
| В предыдущей заметке уже упоминалось о том, что модуль nxt-python для языка программирования Python уже имеет встроенную поддержку инструмента по управлению моторами MotorControl. |
- в составе архива модуля есть скомпилированный исполняемый модуль
MotorControl22.rxe(22 - это версия модуля - 2.2), который можно загрузить на NXT блок с помощью поставляющегося в архиве скриптаnxt_pushили программы NeXTTool, доступной для загрузке на сайте BricxCC. Тут же есть и исходный код, который можно собрать исполняемый файл с помощью компилятора NXC непосредственно или с помощью среды BricxCC - в самом модуле nxt-python доступен набор методов класса
MotCont, реализованного в под-модулеnxt.motcont, обеспечивающих обмен сообщениями по USB/Bluetooth с управляющей программойMotorControl. Примечательным фактом является, что никакого специального объекта этого класса создавать не надо. Он автоматически создается в результате инициализации объектаBrick, т.е., например, доступен сразу после того, как объектBrickвернется функциейfind_one_brick(). К объекту классаMotContв этом случае можно обращаться через имяmc(см. пример ниже).
пятница, 5 октября 2012 г.
MotorControl - удаленное управление моторами NXT
 | Управление моторами робота - практически всегда ключевая задача для программиста. Если устройство не имеет двигающихся частей, то его уже трудно назвать роботом. Так уж получилось, что программирование операций с моторами на LEGO роботах, во многих случаях, достаточно непростое занятие. |
- Нельзя повернуть ось мотора в точности на заданный угол поворота
- При одновременном включении двух моторов для перемещения тележки наблюдается рассинхронизация скоростей вращения, что приводит к тому, что робот не едет четко в заданном направлении
среда, 3 октября 2012 г.
Австралийское робототехническое состязание RoboCup Junior
| Как-то в Летнем Робототехническом Лагере на Истре в кулуарах прозвучал вопрос, а какие еще в мире бывают состязания для школьников кроме World Robot Olympiad и FIRST LEGO League. Тогда же был озвучено, что есть например, что-то подобное в Австралии. Так вот, как разсовсем недавно 22-23 сентября прошел очередной чемпионат австралийского состязания RoboCup Junior. |  |
вторник, 2 октября 2012 г.
NXC: датчики, енкодеры, кнопки - взаимодействуем с внешним миром
| Программирование робота, в большинстве случаев, - изменение поведения робота как реакция на информацию, пришедшую к управляющему устройству с датчиков и сенсоров. Эта заметка рассматривает примеры опроса датчиков в языке Not eXactly C, а также некоторые особенности, которые необходимо учитывать при работе с ними. |
Для датчика расстояния (ультразвуковой) используются специальные функции для его инициализации и опроса.
понедельник, 1 октября 2012 г.
Lego-робот подделывает подпись
| Довольно интересный симбиоз получился у Eason Ke: он взял LEGO-манипулятор, с закрепленным в нем карандашом, и широкоэкранный Android смартфон. Затем он написал приложение, которое считывает все перемещения пользователя на экране смартфона, а затем отправляет их на манипулятор. |  |
Автор этого устройства делится с нами не только деталями по сборке манипулятора, но и некоторыми деталями по его программированию: программа на NXC для управления манипулятором и связанная с ней математика.
Подписаться на:
Комментарии (Atom)