
| Традиционно в большинстве учебных центров на занятиях робототехникой большая часть времени уделяется программированию, а вопросы механики освещаются очень редко, можно даже сказать - по необходимости. С другой стороны это довольно интересная область для большинства школьников младших и средних классов - они получают результат с помощью уже известных им навыков конструирования - соединения деталей. | 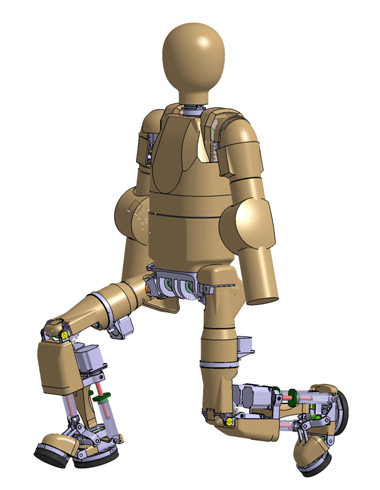 |
В этом цикле статей предлагается рассмотреть предварительный план занятия по конструированию шагающих роботов. Занятие проводится по той же методике, что используется в STEM-центрах Университета Иннополис.
Часть I. Что лучше - колесо или нога?
Занятие стоит начать с того, чтобы обсудить с учащимися, какие традиционные способы перемещения известны для робототехнических механизмов.
В ходе мозгового штурма рисуйте на доске концептуальную карту, которая может выглядеть в итоге следующим образом:

Для ускорения генерации идей мозгового штурма используйте примеры из окружающего нас мира: транспорт, животный мир.
Перед тем, как перейти к следующей части обсуждения попросите учащихся ознакомиться со следующими видео-роликами
Шагающий робот SHAFT
Робот-внедорожник The Journey Robot на шести колесах преодолевает препятствия в лесу
Пусть после просмотра каждого ролика в ходе командного обсуждения будут предоставлены ответы на следующие вопросы:
- В каких условиях данные роботы выполняли свои задачи?
- С точки зрения перемещения в каких условиях робот выполнял свою задачу наиболее эффективно?
- Перечислите, какие задачи с точки зрения перемещения по твердой поверхности, данный робот уже не сможет выполнять?
- Что можно предложить изменить в конструкции этого робота, чтобы он мог выполнять более широкий класс задач, связанных с перемещением.
После обсуждения вопросов, пусть один представитель из команды озвучит их перед другими командами.
Следующей частью обсуждения является понимание какие есть преимущества и недостатки у колесных механизмов и какие у шагающих.
Выводы обсуждения могут быть следующими:
| более простая конструкция | небольшая эффективность в неподготовленной среде |
| более высокая скорость перемещения в подготовленной среде | влияние на окружающую среду (оставляют за собой непрерывную колею, тратя на это большую энергию) |
| может перемещаться в большинстве ландшафтов | сложное управление для обеспечения стабилизации (моноподы, биподы) |
| может функционировать в той же среде, где и человек | либо |
| малое влияние на окружающую среду (взаимодействие с грунтом происходит только в местах упора стопы) | сложность конструкции, большое количество моторов (гексаподы) |
Материалы помогающие подготовиться к обсуждению:
Статья на сайте ASAR
Статья "Ноги, колеса или гусеницы?" на сайте robot-online.ru
Статья "ШАГАЮЩИЕ МАШИНЫ" в журнале "Теория Механизмов и Машин"
Завершите обсуждение рассказом о том, что у некоторых исследователей возникает идея сделать гибридные устройства, которые бы обладали преимуществами как одного, так и другого способа перемещения. Ниже примеры таких устройств:
Робот Halluc II - шагающе-ездящий механизм.

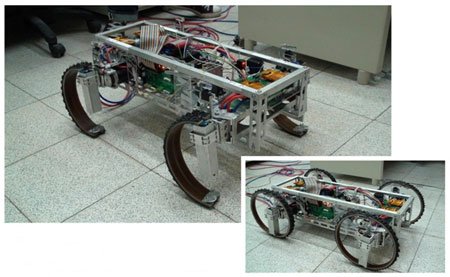
Quattroped - еще один робот совмещающий в себе, как шагание, так и движение с помощью колес.
Комментариев нет:
Отправить комментарий