
 | Когда разрабатывается механизм, основная цель которого перемещаться по горизонтальной поверхности, очень важно озаботиться конструкцией той его части, которая ответственна за движение. Причем важны все ее составляющие: ведущая, которая преобразует крутящий момент двигателя в поступательное движение; управляемая часть, задающая направление движения; и поддерживающая, обеспечивающая опору качения для всей конструкции в целом. |
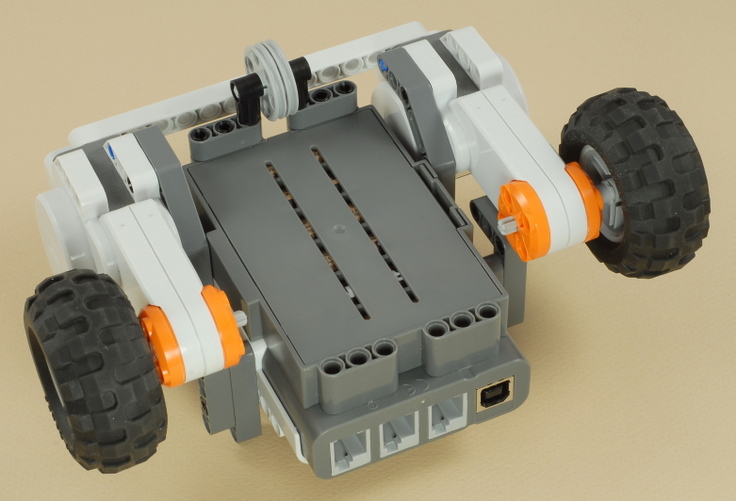
Начнем с наиболее очевидной схемы, которая наиболее привычна, вследствие ее широкой распространенности в окружающем мире: два ведущих колеса и два опорных.

Опорные колеса в этом случае обеспечивают довольно хороший баланс распределения веса робота между колесами. Это приводит к тому, что такое устройство довольно устойчиво и хорошо себя рекомендует как при резком старте/остановке, так и во время самого движения, что вперед, что назад.
Но если робот, собранный по такой схеме начнет выполнять повороты, проявиться ее недостаток.

Как видно из рисунка, при повороте вокруг своей оси, усилие по перемещению поддерживающих колес направлено не по ходу их вращения, а под угом. В зависимости от поверхности движения, это приводит к тому, что из-за повышенной силы трения, энергия поворота тратиться на борьбу с ней и, чаще всего, поворот выполняется с подергиваниями, небольшими скачками, а, значит, страдает точность поворота.
Поэтому, если наиболее типичный характер движения вашего робота - езда взад и вперед, и он будет выполнять минимальное количество разворотов - данная схема сборки будет неплохим вариантом. Но при частом выполнении поворотов, вы можете почувствовать неоптимальность конструкции и пересмотреть ее.
Второй вариант сборки, вытекает из первого при попытке ответить на вопрос: а что если уменьшить количество опорных колес?
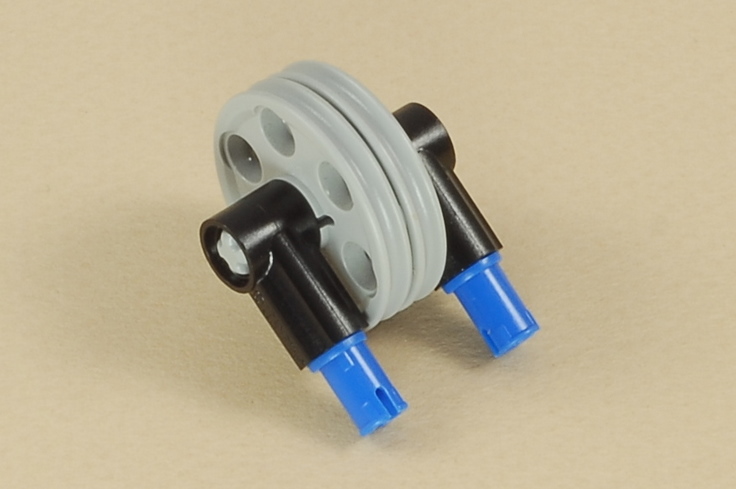 |  |


В схеме с подвижным поддерживающим колесом, решается проблема с выполнением разворотов.
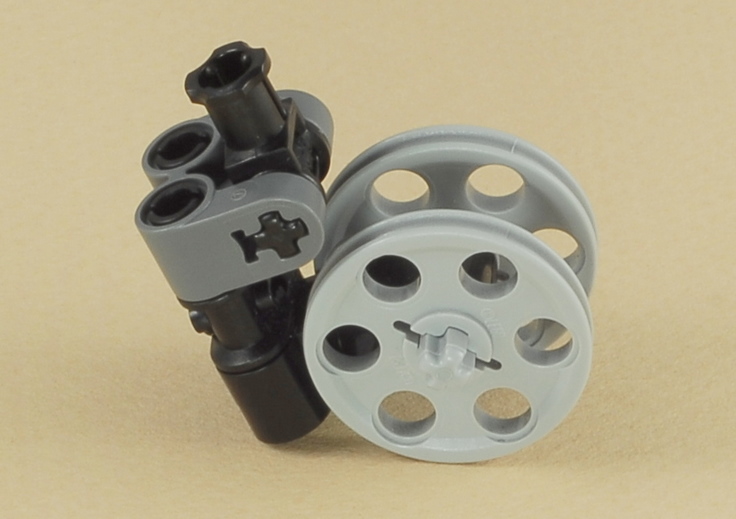 | 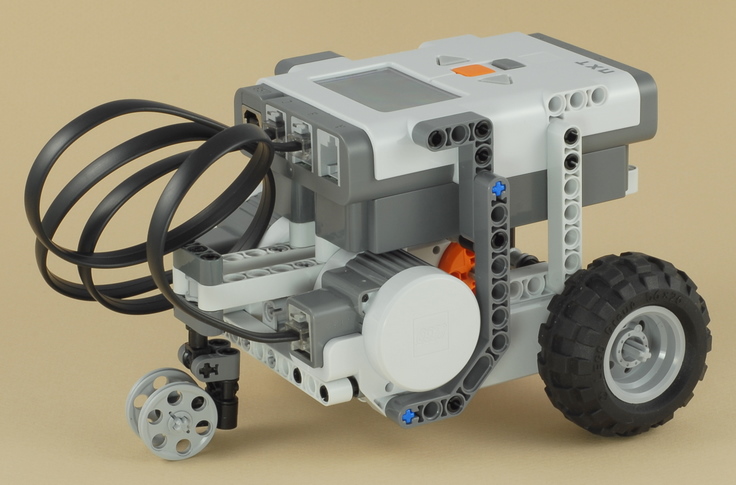 |

Также, при неудачной конструкции опорного колеса, при резкой смене направления движения на противоположное (например ехали вперед, потом назад), видно, что это колесо проворачивается на 180 градусов. Что опять приводит к потере точности передвижения, в частности, на короткие расстояния. В большинстве случаев поведение, описанное выше, исправляется усилением конструкции опорного колеса и/или компенсацией программным путем.
Последнюю рассматриваемую схему нельзя назвать схемой крепления опорного колеса, потому что в ней нет колеса... Зато есть шар.
Как было видно из роликов про голономные движущиеся устройства, при приложении силы шар может двигаться почти в любом направлении в каждый момент времени.

Существует даже специальная Lego-деталь, позволяющая организовать подвижную опору на шаре.


Хотя данная конструкция все еще требует аккуратно нагружать робота дополнительными деталями и сохранять баланс распределения веса, практически все проблемы, связанные с поворотами и резким изменением направления движения, пропадают.
А если при сборке конструкции, использующую такой принцип, существует ограничение на использование деталей сторонних производителей, то опорный элемент, может быть собран только из доступных материалов, на стандартном шаре из набора NXT.

Существенный недостаток такой конструкции - ее большой размер и "пустая" растрата полезных соединительных элементов на удержание большого шара.
Скорее всего, есть еще и другие схемы организации опоры в двигающемся колесном роботе. Если вы знаете такие, не являющиеся производными от перечисленных выше, добавляйте свои комментарии - постараемся также рассмотреть преимущества и недостатки.
Комментариев нет:
Отправить комментарий