


Разница между программами в том, что в одной используются сенсор расстояния, а в другой - сенсор овещенности. В остальном программы похожи: робот меняет направление поворота после того как значение на сенсоре измениться.
Если быть более точным, то в задаче робот поворачивает вправо, если расстояние на сенсоре меньше 14 см. и влево, если расстояние на сенсоре больше 16 см. Сложно представить, для чего может понадобиться такое движение, если сенсор смотрит вперед или назад. Но многое встает на свои места, если предположить, что сенсор установлен на одном из бортов робота и смотрит в сторону.

Если нарисовать схему такого движения, то становится видно, что по левому борту робота на протяжении всего движения, находится какое-то препятствие и робот пытается не подъезжать к нему слишком близко и не отъезжать слишком далеко. Если предположить, что препятствие это стена, то движение робота можно назвать движением вдоль стены. При некрутых заворотах стены, робот будет стараться держаться на определенном расстоянии, т.е. поворачивать вместе с заворотом стены.

Кстати, этот вариант ответа (движение вдоль стены) тоже был среди ответов, которые были присланы после публикации задачи.
Как и с предложенным алгоритмом движения вдоль линии, следует помнить, что данная реализация движения вдоль стены тоже является базовой для изучения. Т.е. при решениях реальных задач, алгоритм движения будет значительно сложнее, но принцип движения останется тот же.
Сейчас же хотелось бы обратить внимание на одну деталь, об которую довольно часто "спотыкаются" те, кто только начинает реализовывать дивжение вдоль стены.
В общем случае, движение робота параллельно стене и сенсор расстояния показывает вполне ожидаемые значение, на основе которых принимается решение в какую сторону поворачивать.

Но может возникнуть ситуация, когда робот в попытке вновь приблизиться к стене, значительно повернется к ней. Это приведет к тому, что сенсор начнет показывать очень большое расстояние - данные после отражения от стены не поступают в сенсор и он "думает", что препятствие еще слишком далеко.

В этом случае, робот будет стараться приблизиться к стене, увеличивая угол между сенсором и стеной, что только будет усугублять ситуацию.
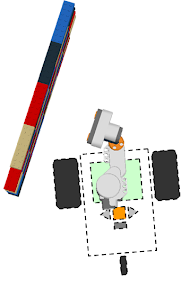
Решение этой проблемы, традиционно, не одно. Оно может быть как программным, так и конструкторским. Например, можно не фиксировать датчик жестко, а поставить его на мотор.

Таким образом, после поворота робота, скажем, налево, сенсор расстояния поворачивается, стараясь быть направленным прямо на стену. А при повороте направо, мотор поворачивает сенсор в другую сторону:
 |  |
Комментариев нет:
Отправить комментарий