 | Для того, чтобы показать возможности редактора nxcEditor и симулятора NXT робота, выложено небольшое видео с демонстрацией основных алгоритмов движения вдоль линии в данной среде. Использовалась самая последняя версия редактора, в которой добавлена возможность тонкой регулировки показаний светового сенсора. |

четверг, 29 марта 2012 г.
NXC: движение вдоль линии в эмуляторе
среда, 28 марта 2012 г.
Lego-автомат для напитков

За 4 месяца он сумел построить следующий механизм. Автомат рассчитан на 2 типа бутылок, поэтому первым делом мы выбираем вид напитка. Затем по ленточному конвейеру бутылка поступает в модуль открывания. Там с помощью специального захвата бутылка лишается пробки. После этой процедуры бутылка направляется в систему охлаждения. Встроенный термометр позволяет охладить напиток до нужной температуры.
И вуаля! Напиток готов!
Вы можете изучить остальные видео на youtube канале Джена, где он подробно рассказывает о составных частях этого автомата.
понедельник, 26 марта 2012 г.
Робот для соревнований: Робот "Ван Гог". Часть V
| Продолжение. Часть I. Часть II. Часть III. Часть IV. За неделю с последней заметки по данной теме произошли следующие события. |  |
Как выступили ребята, подготовленные Дмитрием Сергеевичем, можно посмотреть на этом ролике:
воскресенье, 25 марта 2012 г.
Самый маленький двуногий механизм из NXT?
На странице робота Michael просит написать ему о еще более маленьких двуногих роботах из NXT. Сможешь сделать робота меньше? :)
Новые инструкции по сборке
 | На сайте mindstorms.lego.com, в специальном разделе хранятся инструкции по сборке для тех механизмов, которые можно собрать только из одного набора Lego Mindstorms NXT 2.0 (#8547). Нельзя сказать точно когда именно, но коллекция роботов там существенно расширилась новыми изобретениями довольно известных (в Lego кругах) авторов. |
 |  |  |
| Tribot | MindCuber Rubik Cube Solver | PinballNXT |
| Автор: Daniele Benedettelli | Автор: David Gilday | Автор: Rob Torok |
суббота, 24 марта 2012 г.
Секция Lego-роботов на ITForum 2020
В рамках данного форума преподаватели и ученики Нижегородского Института Информационных Технологий представят презентацию и мастер-класс, посвященный Lego-роботам.
Также будут проведены соревнования среди роботов в дисциплине "Теннис".
С регламентом соревнований можно ознакомиться здесь.
Для участия в соревнованиях необходимо зарегистрировать команду здесь или по телефону 275-85-09 (Ольга).
О том, как проходила презентация Lego-роботов на ITForum в прошлом году можно прочитать здесь.
Особенности организации bluetooth соединения между NXC и NXT-G
| В учебном процессе, если группа ребят работает в рамках одного большого проекта, возможна ситуация, когда в эту группу входят ученики разных уровней подготовки. Например, участники начального уровня умеют программировать еще только на NXT-G, а "продвинутые" ребята уже свободно ориентируются в NXC. |  |
пятница, 23 марта 2012 г.
NXT принтер юного программиста

Работает он по следующей схеме. Сначала картинка закачивается на компьютер, а после этого специальная программа делает ее черно-белой. Затем двухцветная картинка представляется в виде массива единиц и нулей. После этих предварительных операций робот выполняет непосредственно печать рисунка: единицу робот отображает черной точкой, ноль пропускает. Разрешение у этого принтера - 50 на 50 точек.
Международные соревнования RobotChallenge 2012

- Движение по линии
- Мега \ мини \ микро \ нано сумо
- Сумо среди человекоподобных роботов
- Воздушные гонки (среди автономных и полу-автономных роботов)
- Свободная категория
NXC: запуск робота в виртуальном мире
| Еще одна довольно интересная open source разработка. nxcEditor и nxcSimulator. Она позволяет отлаживать программы, написанные на языке NXC (Not eXactly C) в простейшем виртуальном окружении - т.е. без реального робота. |
Графически эмулятор - довольно простой и схематичный. Но тем не менее, даже с помощью него можно знакомиться с программированием Lego-роботов и даже исследовать базовые алгоритмы робототехники.
Ниже можно познакомится с видео-роликами, иллюстрирующими основные возможности данного программного обеспечения.
Робот для состязаний: Робот "Колумб". Часть II
| Нельзя сказать, что трасса в средней группе основной категории Международных Состязаний Роботов в этом году простая. |  |
Попробуем рассмотреть те особенности конструкции, которые необходимо иметь в виду при разработке механизма робота.
I. Центр тяжести.
вторник, 20 марта 2012 г.
Робот для состязаний: Робот "Колумб". Часть I
| Задание в средней возрастной группе Международных Состязаний Роботов в 2012 году позволяет почувствовать конструкторов и программистов роботов первооткрывателями. |
Конечно, ландшафт в случае состязаний - условность, он задается усложняющими элементами на поле:
понедельник, 19 марта 2012 г.
Накопление данных с сенсоров, как средство отладки
| В ходе отладки программ для Lego роботов, особенно когда идет интенсивная работа с сенсорами, возникает ситуация когда сенсор вопреки ожиданиям не срабатывает на какое-то значение. В таком случае используется обычно подход "попробуй и измени" (try and fix): сначала выставляется одно значение, если оно не работает, то выставляется другое и так может продолжаться очень долго. Помимо временных затрат, данный метод не дает понимания почему одни значения не работают, а другие начинают работать. |  |
В образовательной (education) версии Lego Mindstorms NXT-G 2.0 такой режим включен в программу. В коробочных (retail) версиях данного продукта, эта функциональность отсутствует. Но это не должно мешать использовать предложенный метод, поскольку организовать накопление и запись данных можно самостоятельно.
воскресенье, 18 марта 2012 г.
Видео-уроки по программированию на NXT-G
| В каждой стране движение по развитию образовательной робототехники развивается по разному. |  |
Вот, например, в испаноговорящем мире Lego-образование поставлено на рельсы общей вовлеченности и открытости. Одним примером является журнал Hispabrick, о котором уже упоминалось в предыдущих статьях.
Еще одним примером может служить видеоблог, организованный образовательным ресурсом из Чили edubrick. В этом блоге преподаватели довольно подробно рассказывают о возможностях среды программирования NXT-G и способах решения типовых задач на этом языке.
Поскольку видеоблог ведется на испанском языке, а субтитров к нему хотя бы на английском языке создатели не предусмотрели, ищутся желающие, которые бы могли выполнить перевод данных обучающих материалов.
Робот для состязаний: Робот "Ван Гог". Часть IV
| Продолжение. Часть I. Часть II. Часть III. Для программирования перемещения робота "Ван Гог" по полю имеет смысл назначить код каждой позции, откуда и куда робот должен приехать. |

суббота, 17 марта 2012 г.
NXTLOG: Собери свой сумасшедший механизм
| На официальном сайте mindstorms.lego.com в разделе, где пользователи делятся своими собственными конструкциями, NXTLOG, объявлено новое состязание "Crazy Contraption Building Challenge", на русский язык его можно было бы перевести как "Состязание по сборке ненормальных приспособлений". |  |
Множество роботов разработаны, чтобы оптимальным образом выполнять простые задачи, что позволило бы сделать нашу жизнь легче. Но что, если робототехнические механизмы делали бы простые задачи чрезмерно сложным способом? Это как раз то, что мы бы хотели от вас увидеть в этом состязании по сборке NXT механизмов. Мы хотим, чтобы вы разработали ненормальное LEGO MINDSTORMS NXT приспособление, которое бы выполняло какую-то простую, тривиальную задачу вроде переворота страницы или сборке двух LEGO деталей, но наиболее сложным путем, который вы сможете себе представить. Да, в основу данного состязания легли идеи Руби Голдберга. В состязании нет ограничения на количество LEGO MINDSTORMS NXT сенсоров, моторов, NXT блоков, HiTechnic сенсоров или на использование Bluetooth соединений, которые вы можете использовать в своем ненормальном приспособлении.

Робот для состязаний: Робот "Ван Гог". Часть III
| Если внимательно изучить поле для состязаний в старшей группе, то можно обратить внимание на деталь, которая позволит несколько соптимизировать программу для робота. |

пятница, 16 марта 2012 г.
Звездные войны на одном из старых наборов Mindstorms
| В одной из прошлогодних статей был опубликован обзор различных управляющих блоков Mindstorms серии. Один из блоков был - Micro Scout. Официально компания Lego продавала данный блок в составе двух комплектов: Droid Developer Kit и Darkside Developer Kit. Базовые модели для этих наборов были модель робота R2D2 и модель Имперский шагающий танк AT-AT. |  |
Ниже можно ознакомится с двумя обзорами (на английском языке) для этих наборов от видеоблоггера nathnfast.
Робот для состязаний: Робот "Ван Гог". Часть II
| По формулировке задания в старшей группе основной категории положение кубиков на карте заранее неизвестно. |
Т.е. если мы имеем робота захватишего кубик в одной из четырех разных позициях на поле, то робот должен уметь проложить маршрут из каждой позции к каждому столбику. Иными словами, в общем случае, робот должен хранить в памяти 16 различных маршрутов (пока вопрос, что маршруты по больше части очень похожи, не рассматриваем).

Идея для урока: беспроводные коммуникации
| В ходе занятий по робототехнике в классе можно встретить ребят, которым ближе программирование, и душа совсем не лежит к конструированию. Это совсем не значит, что эти ребята не могут посещать такие занятия. Надо всего лишь вспомнить, что NXT блок - это тот же компьютер - у него есть и экран и клавиатура. Поэтому учеников, увлеченных только программированием, можно заинтересовать заданиями, которые совсем не требуют конструирования. |  |
четверг, 15 марта 2012 г.
Робот для состязаний: Робот "Ван Гог". Часть I
| Задание в старшей группе Международных Состязаний Роботов названо в честь одного из величайших художников-постмодернистов Винсента Ван Гога. |
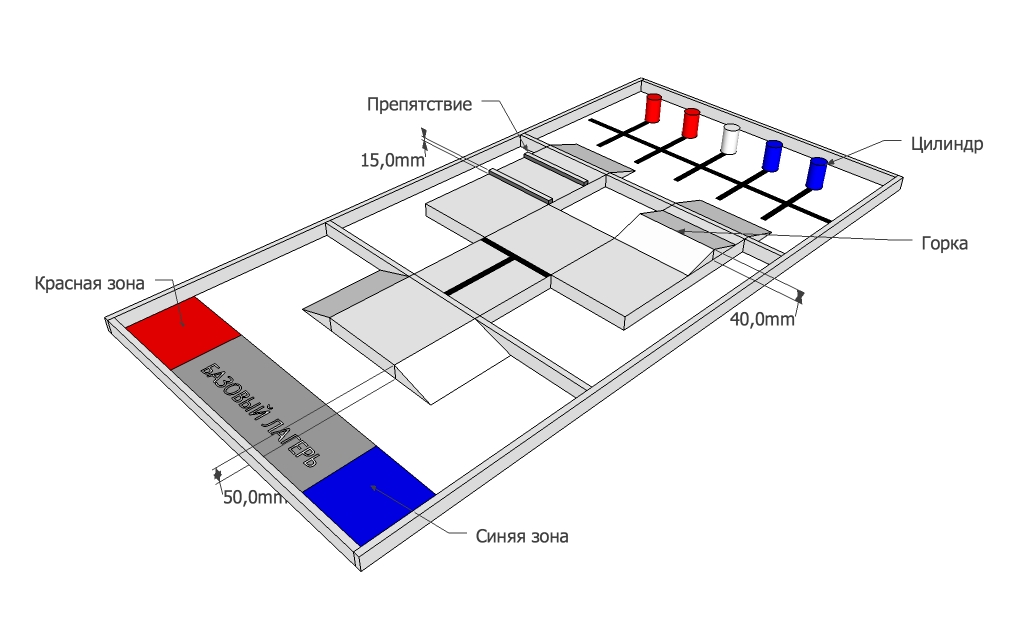
Робот для состязаний: Робот "Менделеев"
| Задание для младшей группы основной категории Международных Состязаний Роботов называется "Робот Менделеев" и оно подразумевает, что нужно построить робота, который способен к систематизации объектов в соответствии с характеристикой ячейки. |  |
Основная сложность в данном задании – границы ячеек, которые представлют собой барьеры высотой 3 см.
среда, 14 марта 2012 г.
Фото-репортаж о МСР 2012 от Виктории Зайцевой
 | Если вы ходили на нижегородский этап Международных Состязаний Роботов, то, наверное, могли обратить внимание на хрупкую девушку с большим фотоаппаратом. Это была фотограф - Виктория Зайцева (@winvika) |
Если у вас нет учетной записи в этой социальной сети - не переживайте. Отсортированные фотоматериалы доступны также в web-альбоме Picasa. Слайд-шоу фотографий из этого альбома можно посмотреть ниже (441 фотография!).
Про еще один видео-блог
| После публикации прошлого сообщения о отечественном видео-блоге, посвященному Lego Mindstorms тематике, в комментариях появилась ссылка на еще один видео-блог. |  |
Вот, например, их реализация широко известной игры Pinball.
Использование Lego в научных целях
 | Данный материал является переводом статьи "Cambridge Researchers Use Legos to Build Artificial Bone in the Lab" Исследователи из Кембриджского университета создают искусственную кость, и по тому как они это делают, можно сказать, что у них довольно необычный партнер: Lego. |
Роботы, как видно на видео, ответственны за создание образца кости, тем самым освобождая исследователей для выполнения других лабораторных задач. Это довольно умно. Lego, со своей стороны, видит свою увеличивающуюся роль в лабораториях в частности и в образовании вообще. Компания объединила усилия вместе с Google для проведения научной ярмарки Google (Google Science Fair) 2012, что является довольно интересной инициативой для привлечения детей 13-18 лет на поиск ответов на те вопросы, которые докучают им, используя тот способ, который они смогут воплотить.
вторник, 13 марта 2012 г.
Робот для состязаний: творческая категория МСР/WRO 2012
| Для того чтобы участники Международных Соревнований Роботов (a.k.a WRO) 2012 лучше подготовились к творческой категории, хочется еще раз обратить внимание на формулировку темы этого года. |  |
Роботы, сумевшие стать неотъемлемой частью нашей повседневной жизни, способные общаться с людьми и выполнять для них различного рода сложные задачи, всегда были предметом самых заветных мечтаний научных фантастов. Чтобы воплотить эти мечты в реальность, роботы должны обладать способностью учиться и развивать свой искусственный интеллект самостоятельно. Вместе с тем еще важнее, чтобы роботы в первую очередь "понимали", как люди функционируют и взаимодействуют между собой на межличностном и социальном уровнях.
Именно этим аспектам и предстоит уделить особое внимание в рамках темы творческой категории Международных состязаний роботов этого года, которая звучит так: "Объединение роботов и людей". Участникам этих соревнований необходимо будет создать роботов, способных убедительно продемонстрировать понимание отдельных сторон человеческой природы, того, как человек живет и трудится в обществе других людей.
воскресенье, 11 марта 2012 г.
Отечественный видеоблог о Lego
| Приятно видеть на просторах Рунета, что людей, увлекающихся Lego-робототехникой, становится все больше и больше. |
Вот, например, видео такого продвинутого папы:
Подпишитесь на его видеоблог и всегда будете в курсе, какое следующее изобретение собрали он и его сыновья.
Репортажи о нижегородском этапе Международной робототехнической олимпиады 2012
В интернете стали появляться видео посетителей, а по телевидению - репортажи о региональном этапе Международной робототехнической олимпиады.
Репортаж "Вести Приволжье":
| Репортаж ННТВ: |
Репортаж китайского канала Синьхуа:
Видеоролик о олимпиаде:
Видеоролик о олимпиаде:
Видео с творческой категории:
Механический манипулятор
Механический манипулятор
Просьба указывать в комментариях репортажи, не опубликованные здесь. Для удобства просмотра, другие репортажи будут добавляться сюда.
Результаты отборочного этапа Международной робототехнической олимпиады 2012

В основной категории соревнования проводились в 3 возрастных группах: в каждой группе было свое задание.
понедельник, 5 марта 2012 г.
WorkShop FIRST

First LEGO Leage (FLL) – это программа по робототехнике для школьников от 9 до 14 лет, которая разработана, чтобы увлечь детей наукой и техникой, организовать их досуг и дать им возможность получить ценные жизненные навыки.
FIRST Tech Challenge (FTC) - Участвуют школьники от 14 до 18 лет. (В сезоне 2011/12 г. допускается участие студенческих команд). Команда: 3 - 10 человек.
В рамках WorkShop-а:
- «философия» соревнований, их отличие от привычных соревнований по робототехнике;
- разработка проекта и технической книги;
- тренировки команд на реальных полях;
- пробные заезды команд, предзащиты проектов.
Подробности: http://robosport.ru/events/workshop/
четверг, 1 марта 2012 г.
Межрегиональная весенняя робошкола в Санкт-Петербурге

В рамках робошколы предусмотрены мероприятия по подготовке к "Робофесту 2012":
- тренинги для руководителей команд по правилам WRO и FLL (с выдачей соответствующего сертификата)
- тренинги для судей WRO и FLL (с выдачей соответствующего сертификата)
- тренинги для учащихся – операторов роботов
- соревнования по робототехнике по правилам WRO, FLL, Кегельринг, Траектория и др.
Школа будет проводится в ФГБУ «Государственный комплекс «Дворец конгрессов», г. Санкт-Петербург, пос. Стрельна, Березовая аллея, д.3
Количество место ограничено, желающие должны пройти регистрацию.
Подробнее о робошколе можно узнать на сайте МСР.
Подписаться на:
Комментарии (Atom)
